{kind=link}
{kind=link}


Hi, there. I'm Zhi Wang. I go by Leo. I'm a first-year CS PhD Student in Robotics🤖 at University of Maryland, College Park, advised by Prof. Yiannis Aloimonos. I received my Bachlor's degree in Electronic Engineering at Tsinghua University.
I'm going to join Amazon FAR (Frontier AI & Robotics) as an Applied Scientist Intern in 2026 summer, working with Dr. Rocky Duan, Prof. Guanya Shi and Prof. Pieter Abbeel.
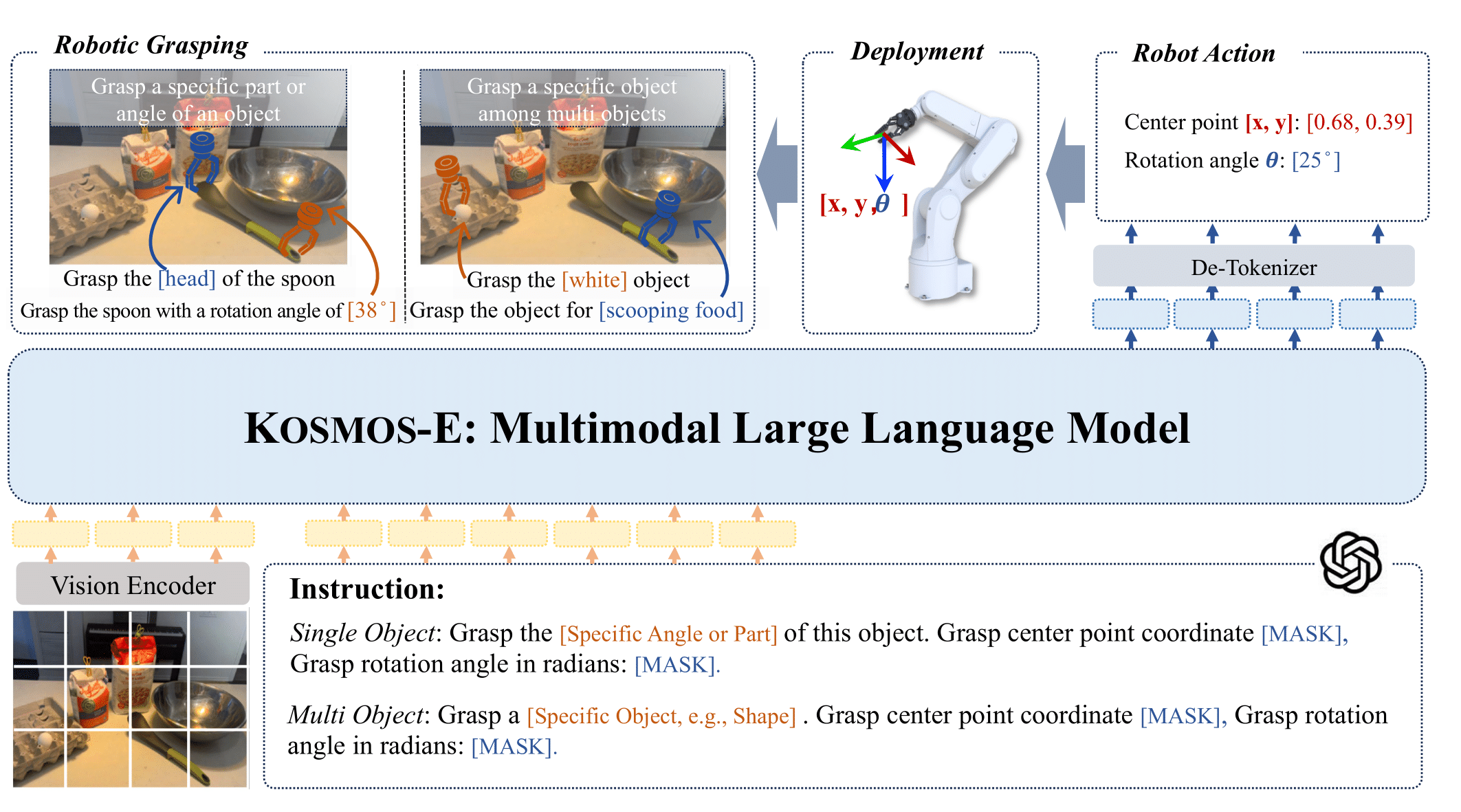
Previously, I was fortunate to work with Prof. Wenzhen Yuan at UIUC CS, Dr. Shaohan Huang at Microsoft Research and Prof. Jianyu Chen at Tsinghua IIIS.
PhD Goal: Let robots learn from multimodal information, like human videos and haptics, to achieve fine-grained and general-purpose robotic manipulation.
 Zhi (Leo) Wang
Zhi (Leo) Wang